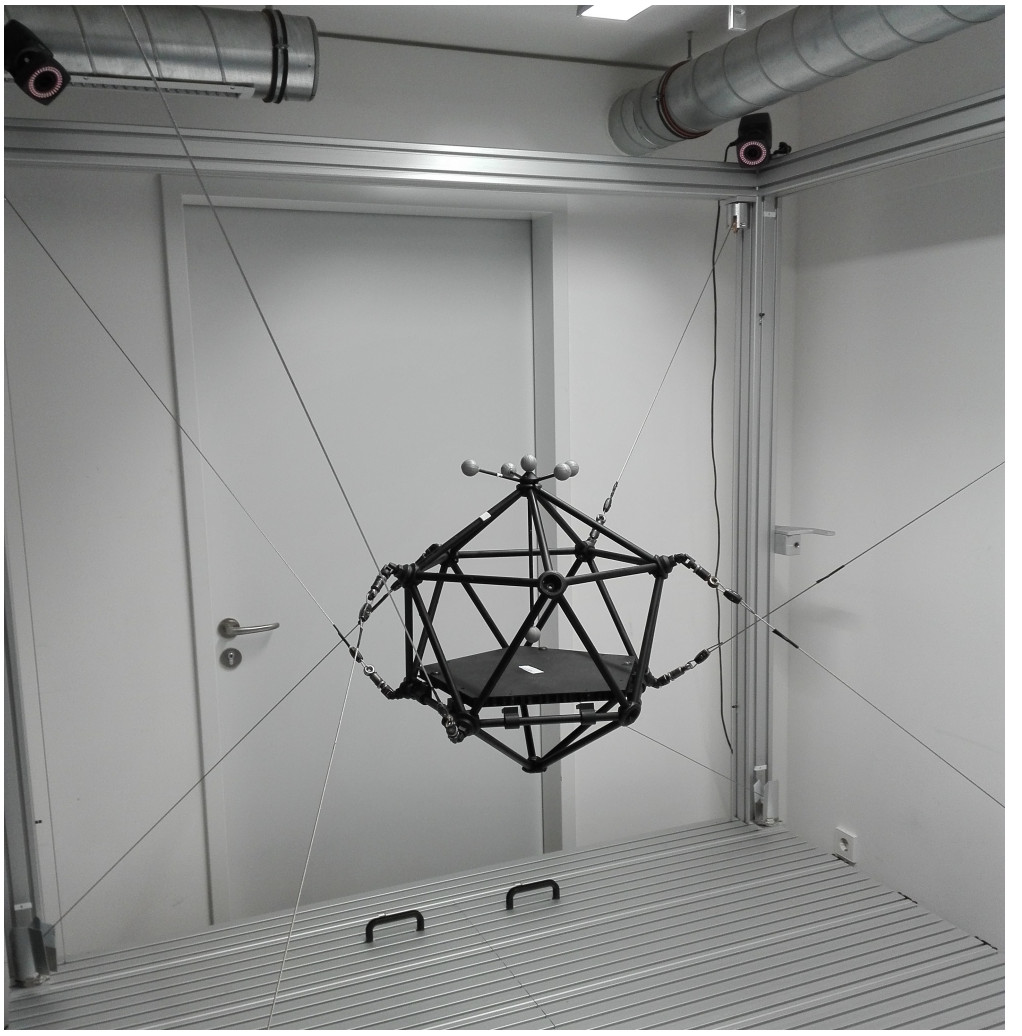
Figure 1. We developed and applied the Adaptive Super Twisting Controller method both to cable-driven parallel robots (left) and to UAVs (right).
During my time at the Max Planck Institute for Biological Cybernetics I worked on the application of sliding mode controllers, and particularly of the Adaptive Super Twisting Controller from Shtessel et al. (2012), both to cable-driven parallel robots and UAVs. What is remarkable about this method is that:
it considers all the uncertainties (parametric, model,disturbances) lumped together;
it does not require the knowledge of the upper bound ofthe uncertainties;
rather than adapting the parameters of the model, it adapts the gains;
it uses a feedforward dynamic inversion (FF) to reduce the discontinuous control, thus improving performance and further reducing chattering.
Figure 2. Results from the application of an Adaptive Super Twisting controller to an UAV. The plots show that the controller is able to quickly react to unforeseen external disturbances.
Related Publications
Book Chapter
Application of a Differentiator-Based Adaptive Super-Twisting Controller for a Redundant Cable-Driven Parallel Robot
Schenk, C., Masone, C., Pott, A., and Bülthoff, Heinrich H.
In this paper we present preliminary, experimental results of an Adaptive Super-Twisting Sliding-Mode Controller with time-varying gains for redundant Cable-Driven Parallel Robots. The sliding-mode controller is paired with a feed-forward action based on dynamics inversion. An exact sliding-mode differentiator is implemented to retrieve the velocity of the end-effector using only encoder measurements with the properties of finite-time convergence, robustness against perturbations and noise filtering. The platform used to validate the controller is a robot with eight cables and six degrees of freedom powered by 940W compact servo drives. The proposed experiment demonstrates the performance of the controller, finite-time convergence and robustness in tracking a trajectory while subject to external disturbances up to approximately 400% the mass of the end-effector.
@inproceedings{Schenk-2018,author={Schenk, C. and Masone, C. and Pott, A. and Bülthoff, Heinrich H.},editor={Gosselin, C. and Cardou, P. and Bruckmann, T. and Pott, A.},title={Application of a Differentiator-Based Adaptive Super-Twisting Controller for a Redundant Cable-Driven Parallel Robot},booktitle={Cable-Driven Parallel Robots},year={2018},publisher={Springer International Publishing},address={Cham},pages={254-267},}
Conference Proc.
Adaptive Super Twisting Controller for a quadrotor UAV
Rajappa, S., Masone, C., Bülthoff, H. H., and Stegagno, P.
In 2016 IEEE International Conference on Robotics and Automation (ICRA) 2016
In this paper we present a robust quadrotor controller for tracking a reference trajectory in presence of uncertainties and disturbances. A Super Twisting controller is implemented using the recently proposed gain adaptation law [1], [2], which has the advantage of not requiring the knowledge of the upper bound of the lumped uncertainties. The controller design is based on the regular form of the quadrotor dynamics, without separation in two nested control loops for position and attitude. The controller is further extended by a feedforward dynamic inversion control that reduces the effort of the sliding mode controller. The higher order quadrotor dynamic model and proposed controller are validated using a SimMechanics physical simulation with initial error, parameter uncertainties, noisy measurements and external perturbations.
@inproceedings{Rajappa-2016,author={Rajappa, S. and Masone, C. and Bülthoff, H. H. and Stegagno, P.},booktitle={2016 IEEE International Conference on Robotics and Automation (ICRA)},title={Adaptive Super Twisting Controller for a quadrotor UAV},year={2016},volume={},number={},pages={2971-2977},doi={10.1109/ICRA.2016.7487462},}
Conference Proc.
Robust adaptive sliding mode control of a redundant cable driven parallel robot
Schenk, C., Bülthoff, H. H., and Masone, C.
In 2015 19th International Conference on System Theory, Control and Computing (ICSTCC) 2015
In this paper we consider the application problem of a redundant cable-driven parallel robot, tracking a reference trajectory in presence of uncertainties and disturbances. A Super Twisting controller is implemented using a recently proposed gains adaptation law [1], thus not requiring the knowledge of the upper bound of the lumped uncertainties. The controller is extended by a feedforward dynamic inversion control that reduces the effort of the sliding mode controller. Compared to a recently developed Adaptive Terminal Sliding Mode Controller for cable-driven parallel robots [2], the proposed controller manages to achieve lower tracking errors and less chattering in the actuation forces even in presence of perturbations. The system is implemented and tested in simulation using a model of a large redundant cable-driven robot and assuming noisy measurements. Simulations show the effectiveness of the proposed method.
@inproceedings{Schenk-2015,author={Schenk, C. and Bülthoff, H. H. and Masone, C.},booktitle={2015 19th International Conference on System Theory, Control and Computing (ICSTCC)},title={Robust adaptive sliding mode control of a redundant cable driven parallel robot},year={2015},volume={},number={},pages={427-434},doi={10.1109/ICSTCC.2015.7321331},}





 Book Chapter
Book Chapter  Conference Proc.
Conference Proc.  Conference Proc.
Conference Proc.