Figure 1. The CableRobot Simulator. Left: a sketch of the setup. Right: lateral view of the simulator when operated.
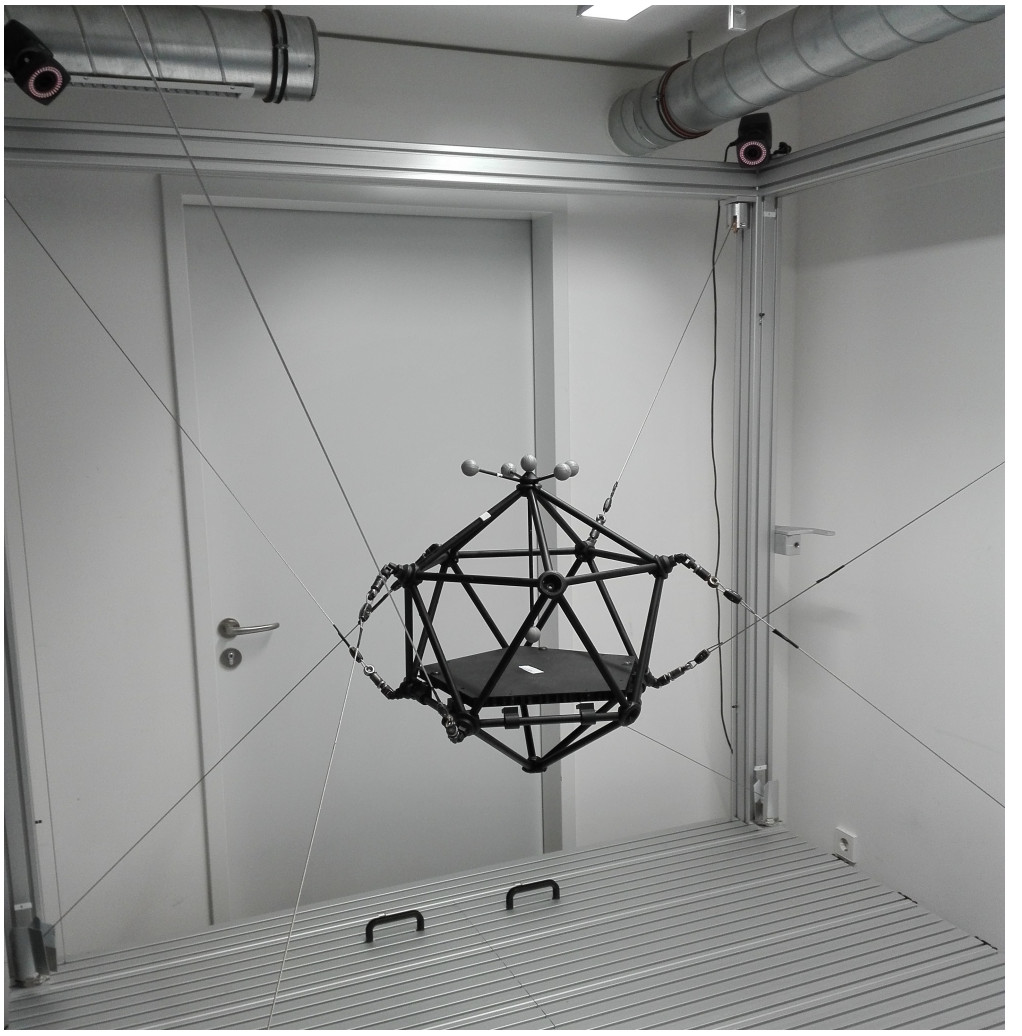
The CableRobot Simulator is world’s first motion simulator based on a cable-driven parallel robot developed in house at the Max Planck Institute for Biological Cybernetics in collaboration with IPA Fraunhofer. This robot uses a parallel platform, typical of the common hexapod simulators, but it uses cables and winches for actuation instead of rigid links. This approach allows to reduce significantly the moved mass and also to expand massively the workspace significantly (up to \(5\times 6 \times 4 m^3\), with maximum roll, pitch and yaw angles of \(\pm40^\circ\), \(\pm40^\circ\), \(\pm5^\circ\) respectively). In comparison to the CyberMotion Simulator, the parallel structure of the CableRobot Simulator allows to achieve higher accelerations ( up to \(14 m/s^2\) at a payload of \(200 kg\)) and faster dynamics. Moreover, the use of cable grants greater flexibility, since the cables can be connected in different ways thus allowing to have different configurations in which the robot can be operated
I contributed to the modelling of the system and to the development of control and tension distribution algorithms for it. One interesting study that we performed on this system was an investigation of the vibrations that occur at the cables for different values of pre-tension. This analysis is important because these vibrations injected in the system propagate to the moving platform and can disrupt the perception of the simulated motion. Using the setup shown in Fig. 2 and power spectral density analysis we measured the natural frequencies of the cable and compared these results to the frequencies predicted by two linear models: i) the linearization of partial differential equations of motion for a distributed cable, and ii) the discretization of the cable using a finite elements model. This comparison provides remarkable insights into the limits of approximated linear models as well as important properties of vibrating cables used in CDPR.
In this paper we present preliminary, experimental results of an Adaptive Super-Twisting Sliding-Mode Controller with time-varying gains for redundant Cable-Driven Parallel Robots. The sliding-mode controller is paired with a feed-forward action based on dynamics inversion. An exact sliding-mode differentiator is implemented to retrieve the velocity of the end-effector using only encoder measurements with the properties of finite-time convergence, robustness against perturbations and noise filtering. The platform used to validate the controller is a robot with eight cables and six degrees of freedom powered by 940W compact servo drives. The proposed experiment demonstrates the performance of the controller, finite-time convergence and robustness in tracking a trajectory while subject to external disturbances up to approximately 400% the mass of the end-effector.
@inproceedings{Schenk-2018,author={Schenk, C. and Masone, C. and Pott, A. and Bülthoff, Heinrich H.},editor={Gosselin, C. and Cardou, P. and Bruckmann, T. and Pott, A.},title={Application of a Differentiator-Based Adaptive Super-Twisting Controller for a Redundant Cable-Driven Parallel Robot},booktitle={Cable-Driven Parallel Robots},year={2018},publisher={Springer International Publishing},address={Cham},pages={254-267},}
Conference Proc. Award
The CableRobot simulator large scale motion platform based on cable robot technology
Miermeister, P., Lächele, M., Boss, R., Masone, C., Schenk, C., Tesch, J., Kerger, M., Teufel, H., Pott, A., and Bülthoff, H. H.
In 2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS) 2016
This paper introduces the CableRobot simulator, which was developed at the Max Planck Institute for Biological Cybernetics in cooperation with the Fraunhofer Institute for Manufacturing Engineering and Automation IPA. The simulator is a completely novel approach to the design of motion simulation platforms in so far as it uses cables and winches for actuation instead of rigid links known from hexapod simulators. This approach allows to reduce the actuated mass, scale up the workspace significantly, and provides great flexibility to switch between system configurations in which the robot can be operated. The simulator will be used for studies in the field of human perception research and virtual reality applications. The paper discusses some of the issues arising from the usage of cables and provides a system overview regarding kinematics and system dynamics as well as giving a brief introduction into possible application use cases.
Winner of the IROS JTCF Novel Technology Paper Award for Amusement Culture
@inproceedings{Miermeister-2016,author={Miermeister, P. and Lächele, M. and Boss, R. and Masone, C. and Schenk, C. and Tesch, J. and Kerger, M. and Teufel, H. and Pott, A. and Bülthoff, H. H.},booktitle={2016 IEEE/RSJ International Conference on Intelligent Robots and Systems (IROS)},title={The CableRobot simulator large scale motion platform based on cable robot technology},year={2016},volume={},number={},pages={3024-3029},doi={10.1109/IROS.2016.7759468},}
Conference Proc. Award
Modeling and analysis of cable vibrations for a cable-driven parallel robot
Schenk, C., Masone, C., Miermeister, P., and Bülthoff, H. H.
In 2016 IEEE International Conference on Information and Automation (ICIA) 2016
In this paper we study if approximated linear models are accurate enough to predict the vibrations of a cable of a Cable-Driven Parallel Robot (CDPR) for different pretension levels. In two experiments we investigated the damping of a thick steel cable from the Cablerobot simulator and measured the motion of the cable when a sinusoidal force is applied at one end of the cable. Using this setup and power spectral density analysis we measured the natural frequencies of the cable and compared these results to the frequencies predicted by two linear models: i) the linearization of partial differential equations of motion for a distributed cable, and ii) the discretization of the cable using a finite elements model. This comparison provides remarkable insights into the limits of approximated linear models as well as important properties of vibrating cables used in CDPR.
Best Paper award Finalist
@inproceedings{Schenk-2016,author={Schenk, C. and Masone, C. and Miermeister, P. and Bülthoff, H. H.},booktitle={2016 IEEE International Conference on Information and Automation (ICIA)},title={Modeling and analysis of cable vibrations for a cable-driven parallel robot},year={2016},volume={},number={},pages={454-461},doi={10.1109/ICInfA.2016.7831867},}
Conference Proc.
Robust adaptive sliding mode control of a redundant cable driven parallel robot
Schenk, C., Bülthoff, H. H., and Masone, C.
In 2015 19th International Conference on System Theory, Control and Computing (ICSTCC) 2015
In this paper we consider the application problem of a redundant cable-driven parallel robot, tracking a reference trajectory in presence of uncertainties and disturbances. A Super Twisting controller is implemented using a recently proposed gains adaptation law [1], thus not requiring the knowledge of the upper bound of the lumped uncertainties. The controller is extended by a feedforward dynamic inversion control that reduces the effort of the sliding mode controller. Compared to a recently developed Adaptive Terminal Sliding Mode Controller for cable-driven parallel robots [2], the proposed controller manages to achieve lower tracking errors and less chattering in the actuation forces even in presence of perturbations. The system is implemented and tested in simulation using a model of a large redundant cable-driven robot and assuming noisy measurements. Simulations show the effectiveness of the proposed method.
@inproceedings{Schenk-2015,author={Schenk, C. and Bülthoff, H. H. and Masone, C.},booktitle={2015 19th International Conference on System Theory, Control and Computing (ICSTCC)},title={Robust adaptive sliding mode control of a redundant cable driven parallel robot},year={2015},volume={},number={},pages={427-434},doi={10.1109/ICSTCC.2015.7321331},}



 Book Chapter
Book Chapter  Conference Proc.
Conference Proc. 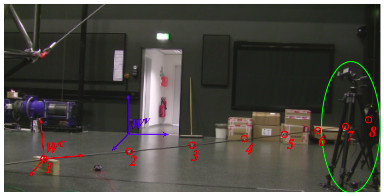 Conference Proc.
Conference Proc. 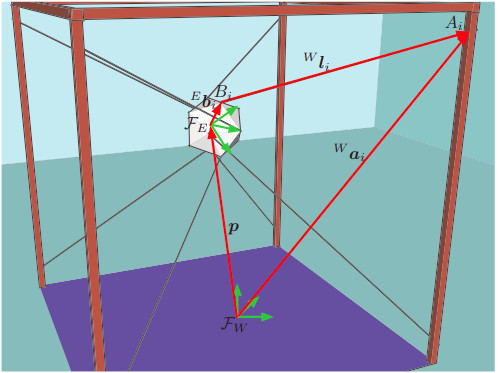 Conference Proc.
Conference Proc.