a motion simulato based on an industrial robot arm
The CyberMotion Simulator is a motion simulator based on an anthropomorphic robot that was developed in house at the Max Planck Institute for Biological Cybernetics. In comparison to the more common and widely available platforms based on a parallel hexapod, the serial structure of the robotic arm allows to have a much larger motion envelop, particularly for what concerns the rotations of the end-effector (i.e. the passenger seat). The idea of the motion simulator is the person onbord the platform guides a simulated vehicle (e.g. a car or a helicopter). The robot then should move according to the trajectory of the virtual vehicle. The goal is for the visual and vestibular feedbacks combined to reproduce same sensation the person would have if they were riding the vehicle. Note that the platform does not have to reproduce exacty the motion of the vehicle. Indeed, this is generally not possible since the robot has a limited motion envelop.
Figure 1: Different control paradigms for various levels of autonomy. Shared control lies between direct control, where the human manualy steers the robot, and supervisory control, where the robot autonomously executes the task while only receiving high-level directives from the operator. Image from my PhD dissertation, titled Planning and control for robotic tasks with a human-in-the-loop.
I have participated to the development of the control and motion planning algorithm for this simulator during my M.sc. thesis and at the beginning of my Ph.D. Since the robot has a very limited translational workspace, it cannot reproduce the sustained translational movements typical of many vehicles (e.g. a car driving on a road). Thus, to reproduce the same sensation we resort to motion cueing algorithms, using in particular washout filters to reproduce high-frequency motions, and tilt-coordination algorithms to reproduce the low-frequency components. The intuition is that the high-frequency component is reproduced by actually moving the motion platform, since this component will in general generate small (thus feasible) displacements. On the other hand, the low-frequency component, comprehensive of sustained linear accelerations, is not achieved by physically accelerating the platform, but by exploiting the local gravity vector as a source of ‘persistent’ acceleration. The motion cuieing algorithm that we developed used a polar coordinate system to make it better fit the capability of the robot to achieve large rotations around its first joint.
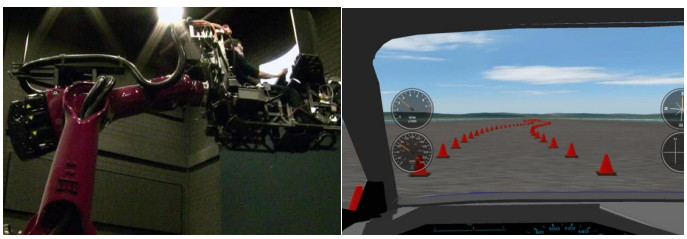
Figure 2.Left: a lateral view of the robot. Right: me inside the cabin, testing the control and motion cueing algorithm on a simulated F1 car.
Another part of my work was modelling the novel 7-th joint that was integrated with the cabin. The joint has a complex behaviour, because it is composed by a rail with straight and curve components. This leads to a switching behaviour that, depending on the state of the joint, can produce translations, rotations or a combination of both.
Figure 2. Images from the novel actuated cabin that was designed and developed for the CyberMotion Simulator. Left: Details of the cabin. Right: a simplified view of the joint motion of the cabin.
Related Publications
Conference Proc.
Roll rate thresholds and perceived realism in driving simulation
Nesti, A., Masone, C., Barnett-Cowan, M., Robuffo Giordano, P., Bülthoff, H. H., and Pretto, P.
Due to limited operational space, in dynamic driving simulators it is common practice to implement motion cueing algorithms that tilt the simulator cabin to reproduce sustained accelerations. In order to avoid conflicting inertial cues, the tilt rate is kept below drivers’ perceptual thresholds, which are typically derived from the results of classical vestibular research where additional sensory cues to self-motion are removed. Here we conduct two experiments in order to assess whether higher tilt limits can be employed to expand the user’s perceptual workspace of dynamic driving simulators. In the first experiment we measure detection thresholds for roll in conditions that closely resemble typical driving. In the second experiment we measure drivers’ perceived realism in slalom driving for sub-, near- and supra-threshold roll rates. Results show that detection threshold for roll in an active driving task is remarkably higher than the limits currently used in motion cueing algorithms to drive simulators. Supra-threshold roll rates in the slalom task are also rated as more realistic. Overall, our findings suggest that higher tilt limits can be successfully implemented in motion cueing algorithms to better optimize simulator operational space.
@inproceedings{Nesti-2012,author={Nesti, A. and Masone, C. and Barnett-Cowan, M. and {Robuffo Giordano}, P. and Bülthoff, H. H. and Pretto, P.},booktitle={Driving Simulation Conference 2012},title={Roll rate thresholds and perceived realism in driving simulation},year={2012},volume={},number={},pages={23-31},doi={},}
Conference Proc.
Mechanical design and control of the new 7-DOF CyberMotion simulator
Masone, C., Robuffo Giordano, P., and Bülthoff, H. H.
In 2011 IEEE International Conference on Robotics and Automation 2011
This paper describes the mechanical and control design of the new 7-DOF CyberMotion Simulator, a redundant industrial manipulator arm consisting of a standard 6-DOF anthropomorphic manipulator plus an actuated cabin attached to the end-effector. Contrarily to Stewart platforms, an industrial manipulator offers several advantages when used as motion simulator: larger motion envelope, higher dexterity, and possibility to realize any end-effector posture within the workspace. In addition to this, the new actuated cabin acts as an additional joint and provides the needed kinematic redundancy to cope with the robot actuator and joint range constraints, which in general can significantly deteriorate the desired motion cues the robot is reproducing. In particular, we will show that, by suitably exploiting the redundancy better results can be obtained in reproducing sustained acceleration cues, a relevant problem when implementing vehicle simulators.
@inproceedings{Masone-2011,author={Masone, C. and {Robuffo Giordano}, P. and Bülthoff, H. H.},booktitle={2011 IEEE International Conference on Robotics and Automation},title={Mechanical design and control of the new 7-DOF CyberMotion simulator},year={2011},volume={},number={},pages={4935-4942},doi={10.1109/ICRA.2011.5980436},}
Conference Proc.
A novel framework for closed-loop robotic motion simulation - part II: Motion cueing design and experimental validation
Robuffo Giordano, P., Masone, C., Tesch, J., Breidt, M., Pollini, L., and Bülthoff, H. H.
In 2010 IEEE International Conference on Robotics and Automation 2010
This paper, divided in two Parts, considers the problem of realizing a 6-DOF closed-loop motion simulator by exploiting an anthropomorphic serial manipulator as motion platform. After having proposed a suitable inverse kinematics scheme in Part I [1], we address here the other key issue, i.e., devising a motion cueing algorithm tailored to the specific robot motion envelope. An extension of the well-known classical washout filter designed in cylindrical coordinates will provide an effective solution to this problem. The paper will then present a thorough experimental evaluation of the overall architecture (inverse kinematics + motion cueing) on the chosen scenario: closed-loop simulation of a Formula 1 racing car. This will prove the feasibility of our approach in fully exploiting the robot motion capabilities as a motion simulator.
@inproceedings{Robuffo-2010b,author={{Robuffo Giordano}, P. and Masone, C. and Tesch, J. and Breidt, M. and Pollini, L. and Bülthoff, H. H.},booktitle={2010 IEEE International Conference on Robotics and Automation},title={A novel framework for closed-loop robotic motion simulation - part II: Motion cueing design and experimental validation},year={2010},volume={},number={},pages={3896-3903},doi={10.1109/ROBOT.2010.5509945},}
Conference Proc.
A novel framework for closed-loop robotic motion simulation - part I: Inverse kinematics design
Robuffo Giordano, P., Masone, C., Tesch, J., Breidt, M., Pollini, L., and Bülthoff, H. H.
In 2010 IEEE International Conference on Robotics and Automation 2010
This paper considers the problem of realizing a 6-DOF closed-loop motion simulator by exploiting an anthropomorphic serial manipulator as motion platform. Contrary to standard Stewart platforms, an industrial anthropomorphic manipulator offers a considerably larger motion envelope and higher dexterity that let envisage it as a viable and superior alternative. Our work is divided in two papers. In this Part I, we discuss the main challenges in adopting a serial manipulator as motion platform, and thoroughly analyze one key issue: the design of a suitable inverse kinematics scheme for online motion reproduction. Experimental results are proposed to analyze the effectiveness of our approach. Part II [1] will address the design of a motion cueing algorithm tailored to the robot kinematics, and will provide an experimental evaluation on the chosen scenario: closed-loop simulation of a Formula 1 racing car.
@inproceedings{Robuffo-2010,author={Robuffo Giordano, P. and Masone, C. and Tesch, J. and Breidt, M. and Pollini, L. and Bülthoff, H. H.},booktitle={2010 IEEE International Conference on Robotics and Automation},title={A novel framework for closed-loop robotic motion simulation - part I: Inverse kinematics design},year={2010},volume={},number={},pages={3876-3883},doi={10.1109/ROBOT.2010.5509647},}





 Conference Proc.
Conference Proc. 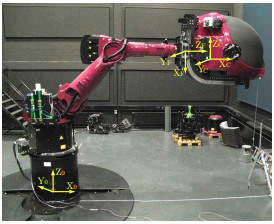 Conference Proc.
Conference Proc. 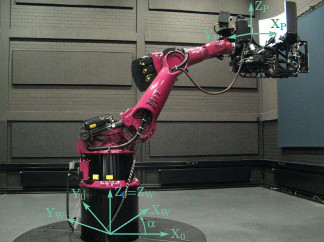 Conference Proc.
Conference Proc. 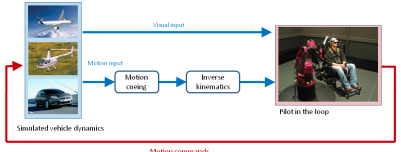 Conference Proc.
Conference Proc.